Влияние на поворачивание тяговых сил |
Предыдущая Содержание Следующая |
|
|
Анализ поворота, разработанный в начале этой главы, не рассматривает потенциальное воздействие движущих сил, присутствующих на колёсах. Теперь мы рассмотрим случай движущих сил, присутствующих на передних и задних колёсах, чтобы вывести общее уравнение, показывающее их влияние.
Для учёта движущих сил используем модель "велосипеда" в повороте, как показано на Рисунке 6.19.
 Рис. 6.19. Модель в повороте с тяговыми силами.
Применение второго закона Ньютона в поперечном направлении имеет вид:
(6-62)
(6-63)
где:
Wf, Wr = Нагрузка на передней и задней осях V = Скорость движения вперёд R = Радиус поворота Fyf, Fyr = Боковые силы на передней и задней осях Fxf, Fxr = Тяговые силы (tractive forces) на передней и задней осях αf, αr = Углы увода передних и задних колёс
Теперь, боковые силы, Fyf и Fyr - это просто жёсткость при движении в повороте на оси, умноженная на угол увода. Если сделать эту замену в формулах (6-62) и (6-63), правая часть будет содержать только тяговые силы и углы увода. Предполагая малые углы, cos α = 1 и sin α = α, можно найти решение для αf и αr для подстановки в это геометрическое уравнение:
(6-64)
При замене δ появляется как в левой, так и в правой частях уравнения, и необходимо манипулировать, чтобы получить его только на левой стороне. В результате:
(6-65)
Это уравнение может быть получено в несколько более удобном виде, если осознать, что Fxf/Cαf и Fxr/Cαr много меньше единицы. В этом случае,
(6-66)
То же самое справедливо и для задней оси.
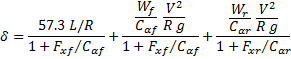
Теперь уравнением (6-65) можно манипулировать в форме:
(6-67)
Это окончательное уравнение поворота для случая, когда учитываются тяговые силы. Обратите внимание, что хотя оно кажется более сложным, чем выведенное ранее, оно содержит те же основные члены. Три слагаемых в правой части следующие:
Выражение 1 - Это угол управления Аккермана, изменённый тяговой силой на передней оси (тяговое усилие сзади здесь не появилось).
•Если Fxf положительна (движущая сила, приложенная в FWD), она уменьшает необходимый угол управления для низкоскоростных манёвров, и принимает во внимание, что FWD "тянет" автомобиль в поворот на манёврах на малой скорости. •Если Fxf отрицательна (эквивалент сопротивления качению (rolling resistance) на RWD или торможения двигателем (engine drag, на FWD), это приводит к увеличению требуемого угла управления для поворота. •Когда передние колёса крутиться на снегу или льду, тяговая сила всё ещё создаётся, но Cαf стремится к нулю. В этом случае знаменатель выражения становится бесконечным, предполагая, что повороты с нулевым радиусом можно сделать практически без угла управления. Этим и объясняется "трюковой" поворот автомобиля с FWD в пределах своей длины на ледяной поверхности резким поворотом колёс и заставляя их вращаться.
Выражение 2 - Это градиент недостаточной поворачиваемости, не изменённый по сравнению с более ранней формой.
Выражение 3 - Это выражение представляет влияние тяговых сил на поведение недостаточной поворачиваемости транспортного средства.
•Если Fxf положительна, она оказывает влияние, вызывая избыточную поворачиваемость (тянет переднюю часть автомобиля в поворот). Таким образом, этот механизм вызывает избыточную поворачиваемость на FWD в случае нажатия на газ (throttle-on). •Если Fxr положительна, она оказывает влияние, вызывая недостаточную поворачиваемость по тем же причинам на RWD. •На 4WD эти механизмы позволяют предположить, что задняя ось должна "перегонять" ("over drive") переднюю ось для обеспечения поведения с недостаточной поворачиваемостью.
Каждому, знакомому с автомобилем с FWD, может быть известно, что механизм избыточной поворачиваемости при нажатии на газ, описанный здесь, не виден на большинстве автомобилей. В ходе обсуждения последствий FWD в разделе, посвящённом управлению, будет видно, что изменение свойств шин в поворотах, вызываемое тяговыми силами, оказывает более сильное влияние на управление, чем прямое действие сил на транспортное средство.
|
| Предыдущая Содержание Следующая |